This is an excerpt from Layton Hale’s lecture notes “Design and Analysis of Constraint Systems” from the November 2010 ASPE Conference.
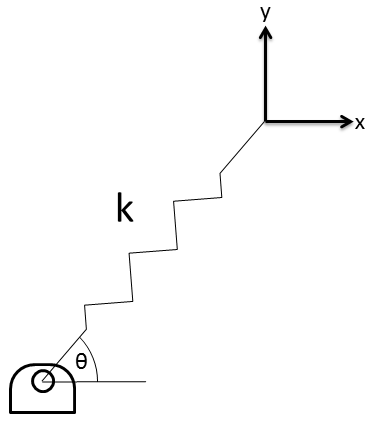
Many engineers make a simple mistake when determining the equivalent stiffness of a spring that is rotated with respect to a coordinate system. Typically they find 

When we displace the spring in the x direction 


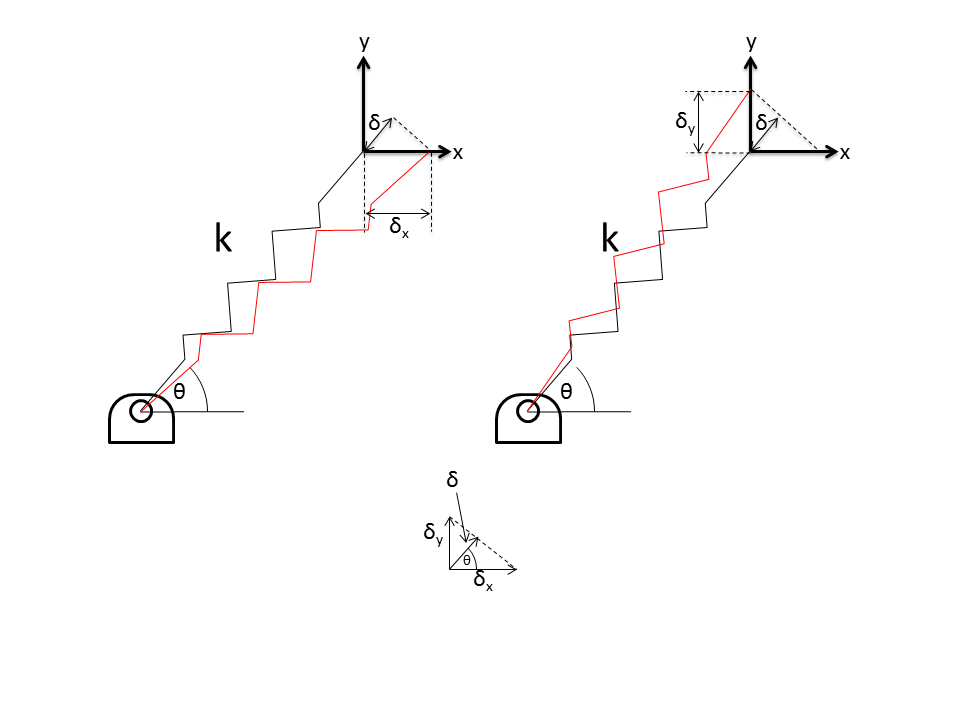 It follows that the spring stiffness along the x-direction is:
It follows that the spring stiffness along the x-direction is:

We can then easily solve for the equivalent stiffness matrix as:

And now we can compute the forces along the rotated coordinate system as:
